
Page 42 - 1-2014
P. 42
машиностроение и металлообработка
ООО «Балт-Систем»:
применение токовых фильтров
в электроприводе CSD-DH
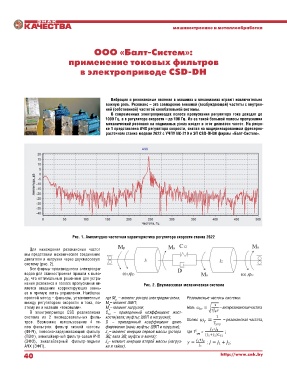
вибрация и резонансные явления в машинах и механизмах играют исключительно
важную роль. Резонанс – это совпадение внешней (возбуждающей) частоты с внутрен-
ней (собственной) частотой колебательной системы.
в современных электроприводах полоса пропускания регулятора тока доходит до
1000 Гц, а в регуляторе скорости – до 100 Гц. Из-за такой большой полосы пропускания
механический резонанс на подвижных узлах входит в этот диапазон частот. На рисун-
ке 1 представлена АчХ регулятора скорости, снятая на модернизированном фрезерно-
расточном станке модели 2622 с УчПУ NC-210 и ЭП CSD-DH30 фирмы «Балт-Систем».
Рис. 1. Амплитудно-частотная характеристика регулятора скорости станка 2622
Для нахождения резонансных частот
мы представим механическое соединение
двигателя и нагрузки через двухмассовую
систему (рис. 2).
Все фирмы-производители электропри-
водов для станкостроения пришли к выво-
ду, что оптимальным решением для устра-
нения резонанса в полосе пропускания яв- Рис. 2. Двухмассовая механическая система
ляется введение корректирующих звень-
ев в прямую ветвь управления. Наиболее
простой метод – фильтры, установленные где M – момент ротора электродвигателя; Резонансные частоты системы:
р
между регулятором скорости и тока, по- М – момент ШВП;
в
этому их и назвали «токовыми». М – момент нагрузки; Ноль – антирезонансная частота
н
В электроприводе CSD реализована С – приведенный коэффициент жест
12
система из 2 последовательных филь- кости(вала; муфты; ШВП и нагрузки);
тров. Возможно использование 4 ти- D – приведенный коэффициент демп Полюс – резонансная частота,
пов фильтров: фильтр низкой частоты фирования (вала; муфты; ШВП и нагрузки);
(ФНЧ), полосно-задерживающий фильтр J – момент инерции первой массы (ротора где Т 2 упр =
1
(ПЗФ), эквалайзерный фильтр-завал АЧХ ЭД; вала ЭД; муфты и винта);
(ЭФЗ), эквалайзерный фильтр-подъем J – момент инерции второй массы (нагруз
2
АЧХ (ЭФП). ки и гайки).
40 http://www.znk.by